Fully Automated Storage Tiering:
FAST allows administrator to define policies and automate the movement of Luns between the Tiers based on the priority.
Advantage of FAST:
- Based on the load the Luns can be placed to High performance Storage tiers EFD.
- Low Used storages are moved to SATA disk group.
Storage Tiers: Collection of same type of storage.
There are 3 Kind of storage tiers available in VMAX:
- EFD
- FC
- SATA
VNX contains 3 types of storage Tiers:
- EFD
- SAS
- NL SAS
We won’t focus on FAST implementation for Thick devices because now a days provisioning of Thick devices are not advised.
FAST VP:
FAST VP is used for the implementation of FAST in Virtual provisioning.
 Let’s see How FAST VP works:
Let’s see How FAST VP works:
- There will be Thin devices being created and allocated to a certain FAST policy.
- Based on the FAST policy defined the highly utilized data from Sub Lun levels are identified.
- Sub Lun highly utilized are moved to Storage Tier Flash.
- Sub Lun underutilized are moved to SATA storage Tier.
- The FAST VP will identify highly utilized Sub Luns based on the Symmetrix Microcode and FAST controller.
Components of FAST VP:

Components description:
EMC Symmetrix has two components one is Microcode which resided in Symmetrix Operating system and other is FAST controller residing in Service process.
- Performance Data Collection:
Constant performance and CPU utilization of Thin Luns are determined in Sub Lun Levels.
- Performance Data Analysis:
Performance data collected are analyzed in the FAST controller.
- Intelligent Tiering Algorithm:
Data collected through Micro code and Analysis report generated by FAST controller are used by Intelligent Tiering Algorithm to issue a Sub Lun movement to VLUN VP data Movement Engine.
- Allocation Compliance algorithm:
Enforces upper limit of Storage Tier can be used for Sub Lun Data Movement for each Storage groups.
- VLUN VP Data Movement Engine:
Based on the Intelligent Tiering algorithm the Extent of data are moved between Tiers.
FAST VP has two modes of operation:
- Automatic: Data Movement and Data Analysis are continuously performed.
- Off Mode: Only performance statistics will be collected, No data movements will take place.
Elements of FAST VP:

Storage Tier:
Collection of drive technology like EFD, FC, SATA.
Storage Group:
Collection of host accessible devices.
FAST Policy:
Percentage of storage capacity between the storage tiers can be used by storage group.
Control Parameters for FAST VP:
- Movement Mode: Automatic or Off
- Relocation rate: Amount of data that can be moved at a Time. They are measured from 1 to 10, Default value is 5; 1 is the highest value and 10 is the lowest value.
- Reserved capacity Limit: Percentage of Virtual pool reserved for Non FAST activity. If we reach this level then FAST movement will not be performed.
- Workload analysis time: Amount of work load analysis samples to be collected.
- Initial period: Minimum amount of work load analysis needs to be completed before analyzing the sample.
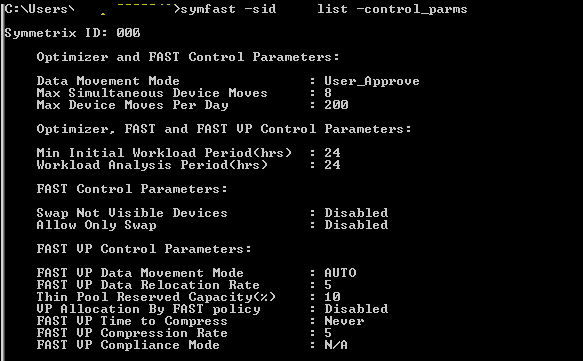
Sample FAST VP control Parameters:
Time Windows for FAST VP:
- Performance Time Window:
Collecting performance data 24×7. This time window can be changed but not recommended by EMC.
- Move Time window:
Time window during which sub Luns can be moved.
FAST implementation steps:
- Enable FAST VP.
- Set Control Parameters.
- Create Storage Tier.
- Create FAST Policy.
- Associate storage group to FAST Policy.
- Enable Time Windows setting.
Pre Checks:
Check for FAST VP licenses:
License can be checked using below command:
Symlmf list –type emclm –sid XXX
Always check with EMC before implementing FAST VP and get the suggestion for control parameters setting and time windows setting.
- Enable FAST VP:
Command to enable FAST VP.
Symfast –sid XX enable –vp
To List the states of FAST VP:
Symfast –sid XX list –state
- Set Control Parameters settings:
To List control parameters:
Symfast –sid xxx list –control_parms
To change control parameters setting:
symfast -sid XXX set -control_parms -mode AUTO_APPROVE -max_simult_devs 8 -max_devs 240 -min_perf_period 2 -workload_period 24 -vp_data_move_mode AUTO -vp_reloc_rate 5 -pool_resv_cap 20 -vp_allocation_by_fp disable
- Create Storage Tier:
Symtier is the command used for creating Storage tier.
RAID protection for Tier creation:
RAID 0 = -tgt_unprotected
RAID 1 = -tgt_raid1
RAID 5 = -tgt_raid5 -tgt_prot 3+1, -tgt_raid5 -tgt_prot 7+1
RAID 6 = -tgt_raid6 -tgt_prot 6+2 , -tgt_raid6 -tgt_prot 14+2
We had already created three pools named EFD,FC,SATA.
Creating EFD Tier:
symtier -sid xxx create -name EFD_VP_Tier -tgt_raid5 -tgt_prot 7+1 -technology EFD -vp -pool PoolName –EFD
Creating FC Tier:
symtier -sid xxx create -name FC_VP_Tier -tgt_raid5 -tgt_prot 3+1 -technology FC -vp -pool PoolName –FC
Creating SATA Tier:
symtier -sid xxx create -name FC_SATA_Tier -tgt_rai6 -tgt_prot 6+2 -technology SATA -vp -pool PoolName –SATA
To List Tiers:
Symfast –sid XXX list

4. Create FAST Policy:
Create FAST VP policy.
symfast -sid xxx -fp create -name EFD_VP
Add Storage Tiers to FAST Policy.
symfast -sid xxx -fp add -tier_name EFD_VP_Tier -max_sg_percent 100 -fp_name EFD_VP
symfast -sid xxx -fp add -tier_name FC_VP_Tier -max_sg_percent 20 -fp_name EFD_VP
symfast -sid xxx -fp add -tier_name SATA_VP_Tier -max_sg_percent 10 -fp_name EFD_VP
Maximum 300% for Storage tier can be allocated to a FAST Policy.
To list FAST VP policy:
Symfast list –sid 606 –fp -vp

5. Associate storage group to FAST Policy:
Storage groups will be created while Auto provisioning for a host.
Associate a Storage group to a FAST policy.
symfast -sid xxx associate -sg Storage_group -fp_name EFD_VP -priority 2
Storage group associated with fast policy will be assigned a priority between 1 to3. 1 is highest, 3 is lowest and 2 is default priority.
To List association:
symfast -sid xxx list –association
6. Enable Time Windows setting:
To List Time window:
Symtw list –sid XXX
To Change the Move Time Window setting:
symtw -sid XXX add -type MOVE_VP -days mon,tue,wed,thu,fri,sat,sun -start_time 18:00 -end_time 24:00 –inclusive
To Change performance Time Window:
symtw -sid xxx -inclusive -type perf add -days Mon,Tue,Wed,Thu,Fri,Sat,Sun -start_time 00:00 -end_time 24:00
Mostly Performance time windows are not changed. Default time windows are preferred for performance time window setting.




























